
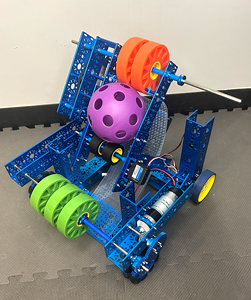
Quick Summary: Prototyping effective FTC intake and shooter systems for your robot is key for teams at any stage of the build season. Even without complex CAD designs, teams can experiment with different wheel types, gear motors, and mounting setups to maximize reliability, consistency, and scoring performance. Robotics prototyping is about learning what works and refining performance over time, not just assembling parts. This article covers the fundamentals of intake and shooter prototyping for your robot, practical tips, and Studica Robotics components that help teams iterate quickly and effectively.
What Is an FTC Intake and Shooter?
 Active Intake: An active intake uses powered rollers or wheels to collect game pieces and feed them into your robot. Unlike passive methods or relying on human players, active intakes improve cycle speed, reduce reliance on loading zones, and make your robot more flexible during matches.
Active Intake: An active intake uses powered rollers or wheels to collect game pieces and feed them into your robot. Unlike passive methods or relying on human players, active intakes improve cycle speed, reduce reliance on loading zones, and make your robot more flexible during matches.
Read “FTC Robot Power Tips“.
For an intake to perform reliably, it must consistently make contact with game pieces, remain stable while interacting with them, and smoothly transition them toward storage or a shooter. Many teams find that stability, not raw speed, ultimately determines intake consistency over multiple match cycles.
Shooter Mechanism: A shooter launches game pieces toward a target from a distance. Consistent shooting reduces the need for tight navigation and maximizes scoring efficiency. Wheel-based and hooded shooters are common, with each type offering a balance between consistency, range, and mechanical simplicity.
Before You Prototype: Define Your Strategy
Before building or opening CAD, clarify what you’re optimizing for. For example, in the FTC DECODE season, teams must decide how they will collect and score artifacts before investing time in mechanism design.
Ask your team:
☑️ Will we rely on human player loading, or collect artifacts directly from the field?
☑️ Where is our biggest scoring bottleneck: collection, transfer, or shooting?
☑️ Are we prioritizing speed, range, or consistency?
☑️ Does our robot need to actuate field elements (such as the gate lever), and if so, how will that affect our front-end design?
☑️ What specific performance goal will this iteration test: intake reliability, reduced tipping, or smoother shooter handoff?
Clear answers ensure each prototype has a defined purpose, making iteration structured instead of reactive. For example, improving intake-to-shooter integration can optimize full-cycle scoring, how many game pieces your robot can collect, transfer, and score in one continuous cycle. The following tips help ensure each prototype teaches you something valuable.
Tips for Iterating Your FTC Intake System
Effective prototyping relies on systematic testing. Prototyping isn’t just about trying new parts; it’s about learning from each test. Use these steps to refine your FTC intake with purpose:
☑️ Adjust one variable at a time (wheel type, motor speed, or intake angle) to isolate improvements.
Check out our Robot Wheels Guide.
☑️ Track metrics like intake success rate, cycle time, and shot consistency.
☑️ Test in match-like conditions to ensure reliability under pressure.
☑️ Lock in geometry only once performance is consistent.
For example, some teams have found that larger flex wheels provide more forgiveness when collecting misaligned game pieces because they deform and conform to the object. However, larger wheels can introduce instability or robot tipping if the structure flexes during intake. Switching to smaller wheels can improve stability and reduce flex, but may require ramp angle adjustments and more precise alignment. Every design choice introduces tradeoffs, and documenting those tradeoffs helps teams make informed decisions rather than guessing. Check out these FTC Starter Kit and FTC Drive Base Kit upgrade ideas.
💡Keeping a simple build log, including wheel diameter, durometer, gear ratios, ramp angles, and observed issues, significantly accelerates future improvements.
FTC Intake Iteration: Flex vs. Drive Wheels
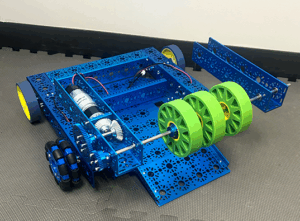
To show how wheel type and size impact intake performance, these two iterations compare a large flex wheel setup with a smaller drive wheel design. Iteration 1 prioritized forgiving artifact collection, while Iteration 2 focused on improving stability and repeatability by switching to drive wheels and adjusting the ramp angle.
| Iteration 1: 100mm Flex Wheels & Initial Ramp | Iteration 2: 50mm Drive Wheels & Adjusted Ramp | |
|---|---|---|
| Key Metric | 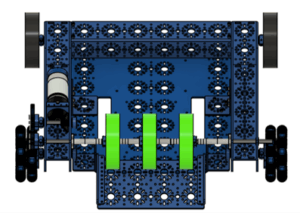 |
 |
| Wheel Type & Size | 100mm 35A Durometer Flex Wheels | 50mm 35A Durometer Drive Wheels |
| Ramp Angle | ~13° | ~16° |
| Robot Stability | Occasional tipping due to wheel size and structural flex | More stable, tipping reduced |
| Artifact Contact | Good, forgiving of misalignment | Requires more precise alignment with smaller wheels |
| Structural Flex | Some flex causing tilting | Reduced flex |
| Cycle Consistency | Moderate | Improved |
| Key Takeaway | Focused on reliability and forgiving alignment. Larger flex wheels handled artifacts well but caused tipping due to structural flex. | Smaller wheels, ramp angle tuning, and intake height improved stability and repeatability, with slightly more precise alignment required. |
This example shows how incremental adjustments to wheel size, ramp angle, and mounting height can significantly impact performance. Teams can use this approach to test multiple intake setups, identify trade-offs, and optimize for reliability without starting from scratch.
Designing an Effective Shooter
A shooter mechanism allows your robot to score from a distance, saving time and reducing the need to navigate crowded field spaces. Common shooter types include wheel-based systems, which accelerate pieces through spinning wheels, and hooded or guided shooters, which control trajectory with a ramp or channel.
Key factors to consider are wheel diameter, hardness, compression, and motor speed. For consistent performance, teams should test shot accuracy and repeatability under conditions that mimic real matches, including imperfect alignment and repeated cycles.
💡A key lesson teams often discover during iteration is that a shooter rarely fails in isolation. Full-cycle testing, including how reliably game pieces move from the intake into the shooter, ensures consistent performance under realistic match conditions.
FTC Shooter Iteration: Accuracy & Intake Integration
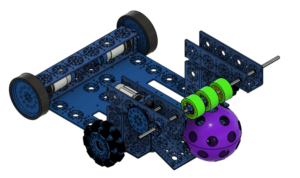
These iterations highlight how shooter performance is influenced by shooter wheel selection, wheel hardness, and intake integration. Iteration 1 used the basic Studica Robotics Starter Bot made with the FTC Starter Kit and standard flex wheels for short-range scoring. Iteration 2 used larger and stiffer shooter wheels, integrated the intake, and added guide wheels to improve shot consistency, reduce player reliance, and optimize full-cycle scoring.
| Iteration 1: Starter Bot Shooter | Iteration 2: Intake-Integrated Shooter | |
|---|---|---|
| Key Metric | 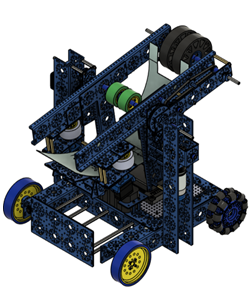 |
 |
| Intake Integration | Not fully integrated | Fully integrated with intake |
| Shooter Wheel Type & Size | Two 50mm 40A Durometer Drive Wheels | Two 100mm 60A Durometer Flex Wheels |
| Indexer & Guide Wheels | 50mm 40A Durometer Drive wheels powered by servos | 50mm 35A Durometer Drive wheels powered by servos |
| Launch Distance | Up to 18” | Improved distance, more consistent |
| Shot Consistency | Moderate, requires close positioning | Improved, less sensitive to robot alignment |
| Mechanical Complexity | Simple, easy to maintain | Increased, requires more tuning |
| Human Player Reliance | Needed for scoring cycles | Reduced, robot can collect and score independently |
| Ball Path Guidance | Basic hopper and ramp | Polycarbonate guides stabilize the trajectory |
| Key Takeaway | The FTC Starter Bot is simple and effective for close-range scoring but relies partially on human player placement and close goal positioning. | Integration with intake, larger wheels, and guides improved consistency and independence, optimizing full-cycle scoring. Mechanical complexity increased, but scoring reliability improved. |
This example highlights the trade-offs in shooter design: integrating the intake improves independence and consistency but adds mechanical complexity and tuning requirements. Teams can use this approach to test different wheel sizes, guide mechanisms, and intake-to-shooter handoff strategies to optimize scoring performance under realistic match conditions.
Recommended Studica Components for FTC Prototyping
Selecting the right robotics components is key to reliable intake and shooter prototypes. Studica Robotics offers parts that allow teams to iterate quickly, test different configurations, and optimize performance for both subsystems.
 Motors & Gears
Motors & Gears
- Updated Maverick Planetary DC Gear Motors: Equipped with multiple planetary gearbox options. Use high-torque ratios for intakes to prevent jams, and moderate-speed setups for shooters to balance cycle speed and artifact launch. Start simple, establish reliability first, then optimize for speed or distance. Read “Understanding the Planetary Gear Motor for FTC Robots” to learn more.
Wheels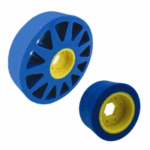
- Flex Wheels: Soft and compliant, excellent for intakes that must handle misaligned game pieces.
- Drive Wheels: Stiffer wheels for precise artifact control, ideal for shooter indexing and stability.
Structural Components
- V-Rails & U-Channels: Provide rigidity and allow adjustable mounting using M3 hole patterns.
- Low-profile U-Channels & Brackets: Support ramps, shooter paths, and intake angles.
- Polycarbonate Sheets: Perfect for intake ramps, guides, or shooter paths, offering lightweight, impact-resistant surfaces.
 |
 |
 |
 |
 |
Even small changes, like adjusting shaft height, ramp angle, or wheel compression, can significantly improve consistency. Modular components allow teams to make these adjustments quickly without full redesigns, keeping prototyping fast, flexible, and effective.
Frequently Asked Questions
Do I need CAD models to start prototyping?
No. Start simple with basic robot components. CAD can help later, but testing real parts gives better insights early on.
How do I know which flex wheel to use?
Softer wheels are ideal for intakes because they conform to game pieces. Harder wheels often improve energy transfer for shooters. Test multiple options to see what works best with your robot’s geometry.
What gear ratio should I pick for my motors?
Start with higher torque ratios for reliable intake performance. For shooters, establish a consistent baseline before increasing speed. Gradually adjust once geometry and wheel choice are stable.
Can this guide help teams late in the season?
Absolutely. Focus on tuning and iteration rather than complete redesigns. Even small tweaks such as adjusting ramp angle, reducing structural flex, and refining wheel compression can significantly improve consistency before championship play.
How do I determine the correct intake angle?
Test your intake with different angles and observe how reliably it collects game pieces. Start in a moderate range (often 15°–30° relative to the floor) and adjust until pickups are smooth and consistent without causing jams or bounce-outs.
Can I use the same wheels for both intake and shooter?
Yes, but consider performance trade-offs. Softer wheels improve intake reliability, while harder wheels may provide more consistent energy transfer for shooters.
What is the best way to document prototypes?
Keep a simple log with wheel types, gear ratios, angles, compression adjustments, and cycle times. Notes on what worked and what failed will save time in future builds.
Closing Thoughts
Prototyping a reliable FTC intake is a combination of experimentation, structured testing, and careful component selection. By focusing on wheel choice, motor selection, structural rigidity, and intake-to-shooter integration, teams can refine their robots efficiently, even late in the season.
Small adjustments often produce meaningful gains. A slight ramp angle change, reduced structural flex, improved handoff alignment, or refined wheel compression can dramatically improve cycle consistency.
With systematic prototyping and thoughtful iteration, teams build not just a stronger robot for this season, but a stronger design process for the seasons ahead.
Share this Post