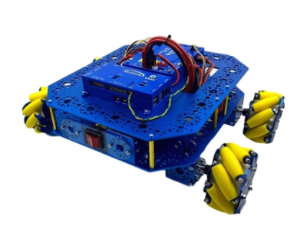
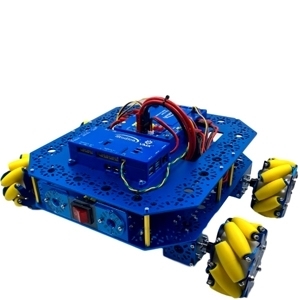
The FTC Drive Base Kit v2 from Studica Robotics is designed specifically for FIRST Tech Challenge teams that need a strong, reliable, and agile mecanum drivetrain. Built with competition-proven components, this kit provides everything you need to create a high-precision, omni-directional drive base capable of handling advanced autonomous paths and demanding maneuvering. Available in blue, red, black, green, silver and gold colors, with D-shaft or Hex-shaft components.
FTC Teams are eligible to purchase one kit at a heavily discounted price. To apply for the discount please click the link below.
Note: Our new structure colors are now in stock! Please reach out to our robotics account representatives at [email protected] if you would like your FTC Drive Base Kit v2 to arrive with a combination of our custom colors, at no extra charge.